| // | Its Documents: | Its Needs Dirs: |
| 01: | One Event that happened | Needs |
| 02: | Needs | |
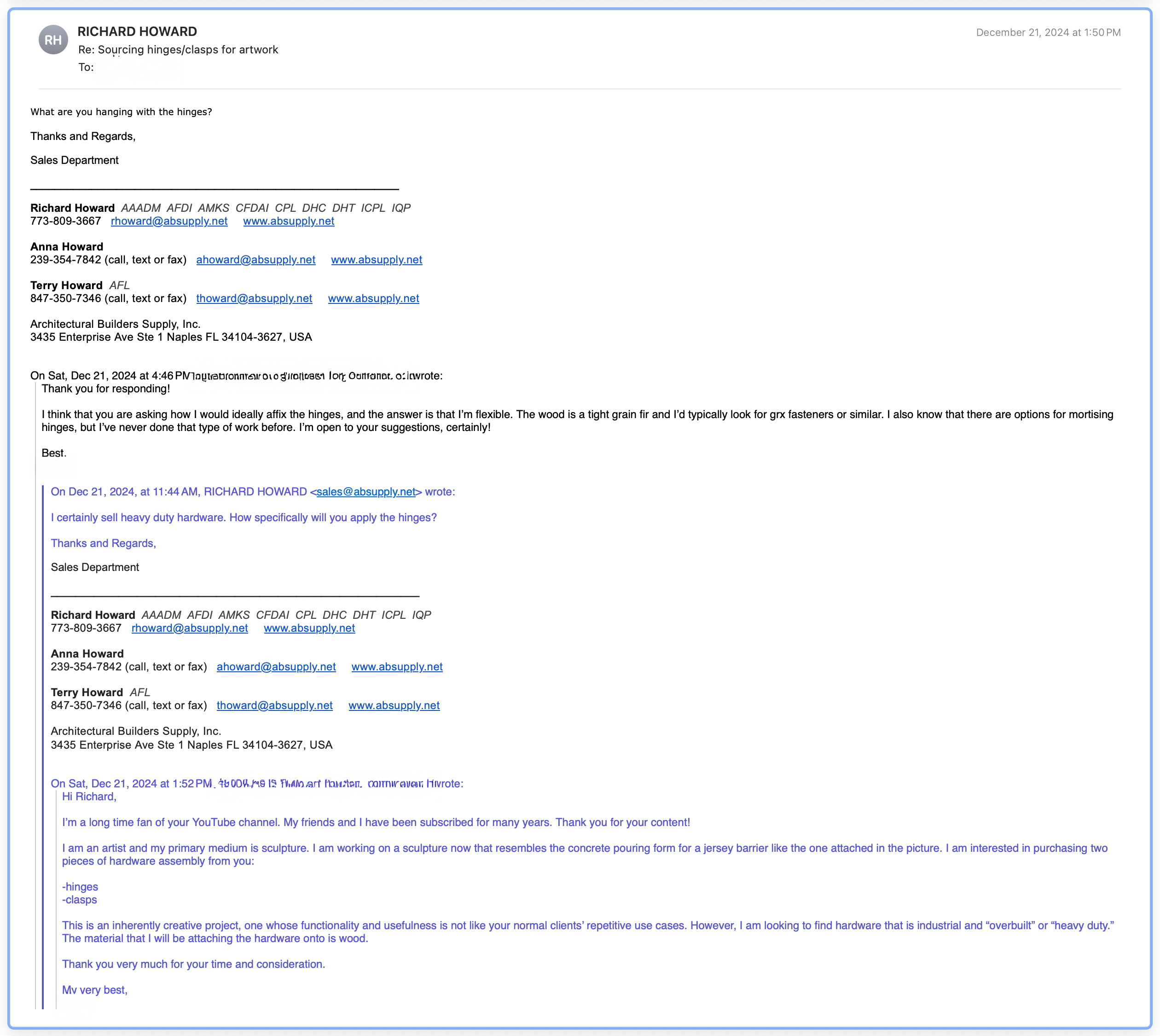
| 03: | The invoices & some responses | Needs |
| 04: | Plenum (Stretching at LHC) | Needs |
| 05: | A documented process | Needs |
| 06: | To jiggle | Needs |
| 07: | Presentation | Needs |
| 08: | Finlay catalog process, Megazord's unboxing/haul, Cardmember Services response | Needs |
| 09: | Sweating, midtown office in the Big Apple, George | Needs |
| 10: | Commercial Quality Product For Sale, Urban Decay at the Pentagon | Needs |
| 11: | WALL-E 1080P | Needs |
| 12: | 1000 headrest covers, Timer Marshmallow Timer Microwave Timer | Needs |
| 13: | No Resolution w/ Richard, Celebrity Endorsement, Prompts for Intelligently Rendering Texture | Needs |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}